リンクLINK
![]()
蝶型はばたき飛翔の力学的解析(ひらひら飛行ロボットの実現を目指して)/菊池耕生(千葉工業大学工学部)
種生物学会 電子版和文誌 第1巻1号 2016年3月
蝶型はばたき飛翔の力学的解析(ひらひら飛行ロボットの実現を目指して)
菊池耕生(千葉工業大学工学部)
トンボに比べて翅の関節自由度が少なく,飛行性能に劣ると思われがちな蝶ですが,10G以上で飛び立つ加速性,群馬から台湾まで渡りが可能なエネルギ効率,1/4はばたきで直角に向きを変えられる旋回性などを考えると,「ひらひら」にはとてもすばらしい能力が秘められています.私たちは,蝶の飛行能力を生み出すメカニズムを明らかにし,その能力を実現するロボットの開発を目指しています.「飛ぶ」を実現する方法はたくさんありますが,翼に着目すると,飛行機の固定翼,ヘリコプターの回転翼,生物のはばたき翼に分けられ,後者ほど小さい物体に採用されています.自重は体長の3乗に比例しますので,小さいほど重力に逆らい易くなります.このため,昆虫にとって飛ぶための設計の許容範囲は広く,様々な翅デザインが生み出されています.4枚翅や2枚翅,長方形の翅や正方形の翅,後翅がセンサに変化し前翅飛翔するものや前翅が硬い鞘翅になって後翅飛翔するものなど様々です.本講演では,蝶(ナミアゲハ)の翅の形や運動の特異性を説明し,それを模倣したロボットを紹介したいと思います.
図1に一般的な固定翼機とナミアゲハを示します.翼幅は50mと10cmですので,体長は約500倍違うことになります.翼形状は固定翼機が細長いのに対して蝶は正方形に近く(アスペクト比が小さく)なっています.翼端から発生する渦を積極的に使いたいかどうかに依存します.また,固定翼機は後退翼ですが,蝶は前進翼です.舵の利き具合に依存します.そして何といっても最大の違いは,尾翼があるかないかです.尾翼によって飛行姿勢は安定になります.ピッチ角,ヨー角,どちらに傾いても元の姿勢に戻り,私たちはマッハ1に近い巡航速度で飛んでいる飛行機の中でも歩くことができます.これに対し,昆虫には尾翼がありません.不安定そうに思えますが,横風にあおられても落ちたりしないところを見ると,何か隠されたメカニズムがあるようです.流体解析技術の進歩により,少しずつ解き明かされてきています.
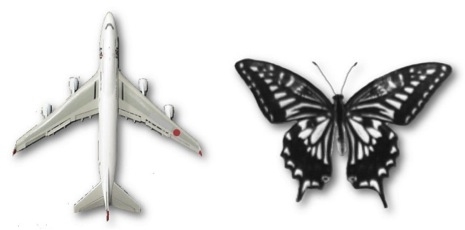
図1. 固定翼機とナミアゲハの比較
次に,ナミアゲハのはばたき運動(飛び立ち)を図2に示します.2回分のはばたきです.1秒間に10回はばたきますので,200ms間の運動です.体を起こしながら翅を垂直に打ち下ろすことによって上昇し,体を元に戻しながら翅を水平に打ち上げることによって前進します.このとき,このピッチ姿勢の振動を効率よく行うため,腹を振り子のように振っています.翅の打ち下ろしと共に腹を上げ,打ち上げと共に腹を下げます.このような運動を四角い不透明な膜翼で1秒間に10回程度やられると,我々の眼にはひらひら飛んでいるように見えます.

>>> 画像をクリックすると大型の画像が開きます <<<
>>> ココをクリックすると動画が開きます <<<
図2. 蝶の飛び立ちの様子(二はばたきで200msほど)
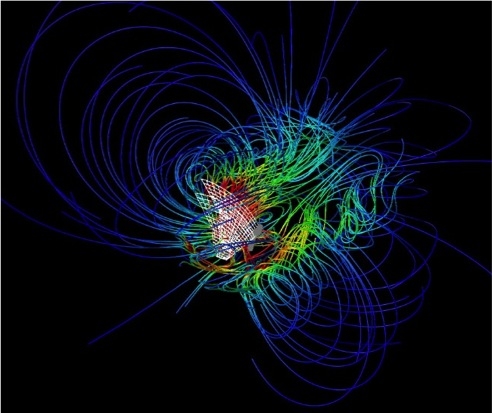
図3は,90°ロール回転したときの翅周りの渦を可視化しています.複数の高速度カメラで撮影された映像から,翅や体の位置座標と速度を測定し,数値流体力学計算により翅周りの流速と圧力を求めています.青い線は遅い流れを,赤い線は速い流れを表しています.左翅の側面に大きな渦が形成されているのが分かります.細長い剛体の翼をもつ固定翼機から作り出される渦は時間と共に変化せず二次元的で比較的単純ですが,正方形に近い弾性膜翼から作り出される渦ははばたき運動と共に変化し三次元的で複雑です.昆虫は翅周りに出来る渦を巧みに利用しており,前縁,翼端,後縁から作り出される渦は揚力改善,姿勢安定化に役立っています.
>>> 画像をクリックすると飛び立ち時の動画が開きます <<<
図3. ロール回転時の翅周りの流れの様子
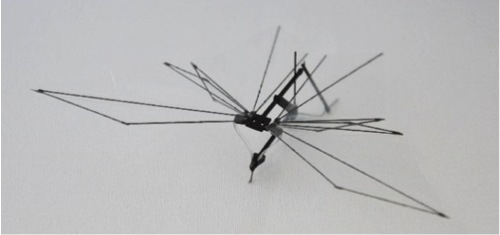
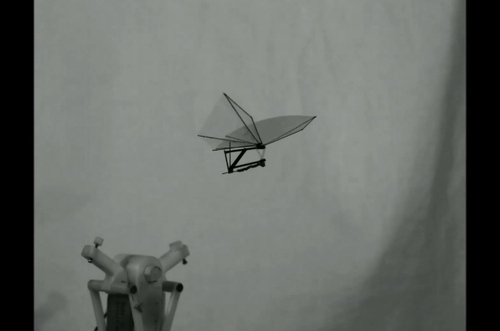
最後に,力学解析に基いて開発した蝶ロボットを図4に示します.質量,体長はナミアゲハと同じで,0.5g,翼幅10cmです.ゴムを動力とし,はばたき周波数は10Hz,リード・ラグ運動(翅の前後運動),フラッピング運動(翅の上下運動),腹振り運動を1自由度の弾性リンク機構で実現しています(1).わずか1秒程度の飛翔ですが,後ろ重心で,ピッチ姿勢を変えながら,ナミアゲハと同じように飛び立ちます.
>>> 画像をクリックすると動画が開きます <<<
図4. 製作した0.5g, 翼幅10cmの蝶ロボット(飛行:カーボン2枚翅モデル)
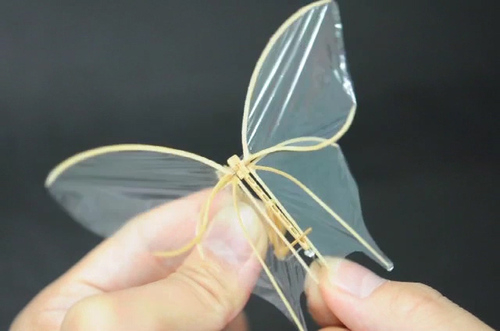
>>> 画像をクリックすると動画が開きます <<<
図4b. 製作した0.5g, 翼幅10cmの蝶ロボット(構造:竹4枚翅モデル)
蝶のひらひらには様々なメカニズムが隠されています.中には,工学的に最適化された部分だけでなく,生物学的合理性から作り出された部分もあるかと思います.もしかしたら,生物学的な合理性が,工学的優位性を妨げている部分があるかもしれません.まずは工学的要素を抽出し,ロボティクスとして洗練することによって,蝶型はばたき飛行を実現したいと思っています.
謝辞
なお,上記飛翔解析はJSPS科研費17686022の助成を受けて実施されたものです.図4は共同研究者である東京電機大学藤川太郎先生からご提供いただきました.感謝いたします.
参考文献
藤川・菊池他: 弾性体リンクによるリード・ラグ機構を有する蝶型はばたきロボットの開発, 日本機械学会論文集C編,Vol.76,No.770, (2010).
Masahiro SHINDO, Taro FUJIKAWA, Koki KIKUCHI: Analysis of Roll Rotation Mechanism of a Butterfly for Development of a Small Flapping Robot,American Transactions on Engineering & Applied Sciences, October 2014, Vol.3(4), pp.233-250, (2014).
Taro FUJIKAWA, Masahiro SHINDO, Koki KIKUCHI: Motion Analysis of Pitch Rotation Mechanism for Posture Control of Butterfly-style Flapping Robot,American Transactions on Engineering & Applied Sciences, October 2014, Vol.3(4), pp.251-263, (2014).
さらに興味のある方々への参考文献
東昭著,生物の動きの辞典,朝倉書店,(1997).
R.マクニール アレクサンダー著,生物と運動―バイオメカニックスの探究,日経サイエンス社,(1992).
アンドレイ・K. ブロドスキイ著,昆虫飛翔のメカニズムと進化,築地書館,(1997).